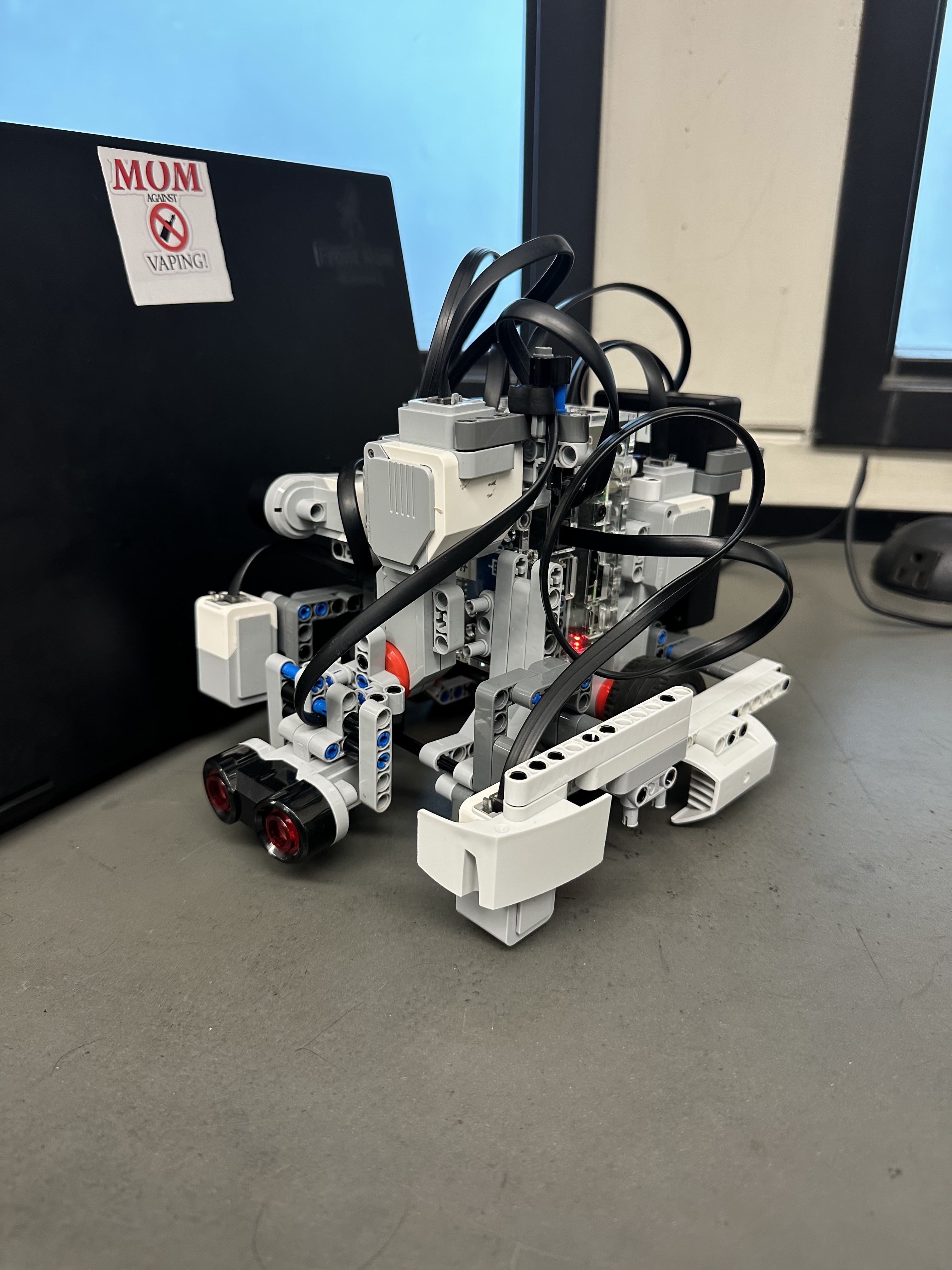
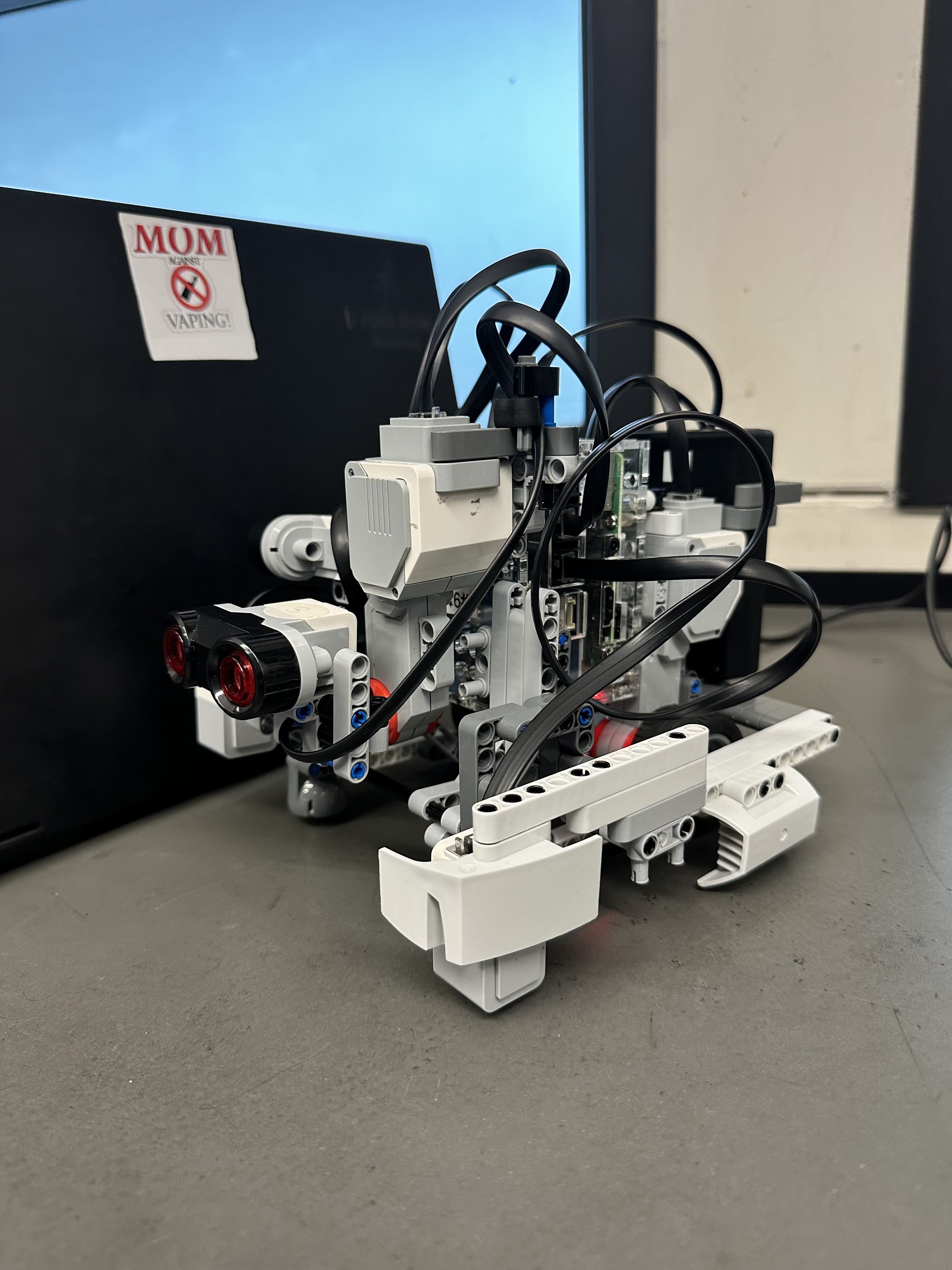
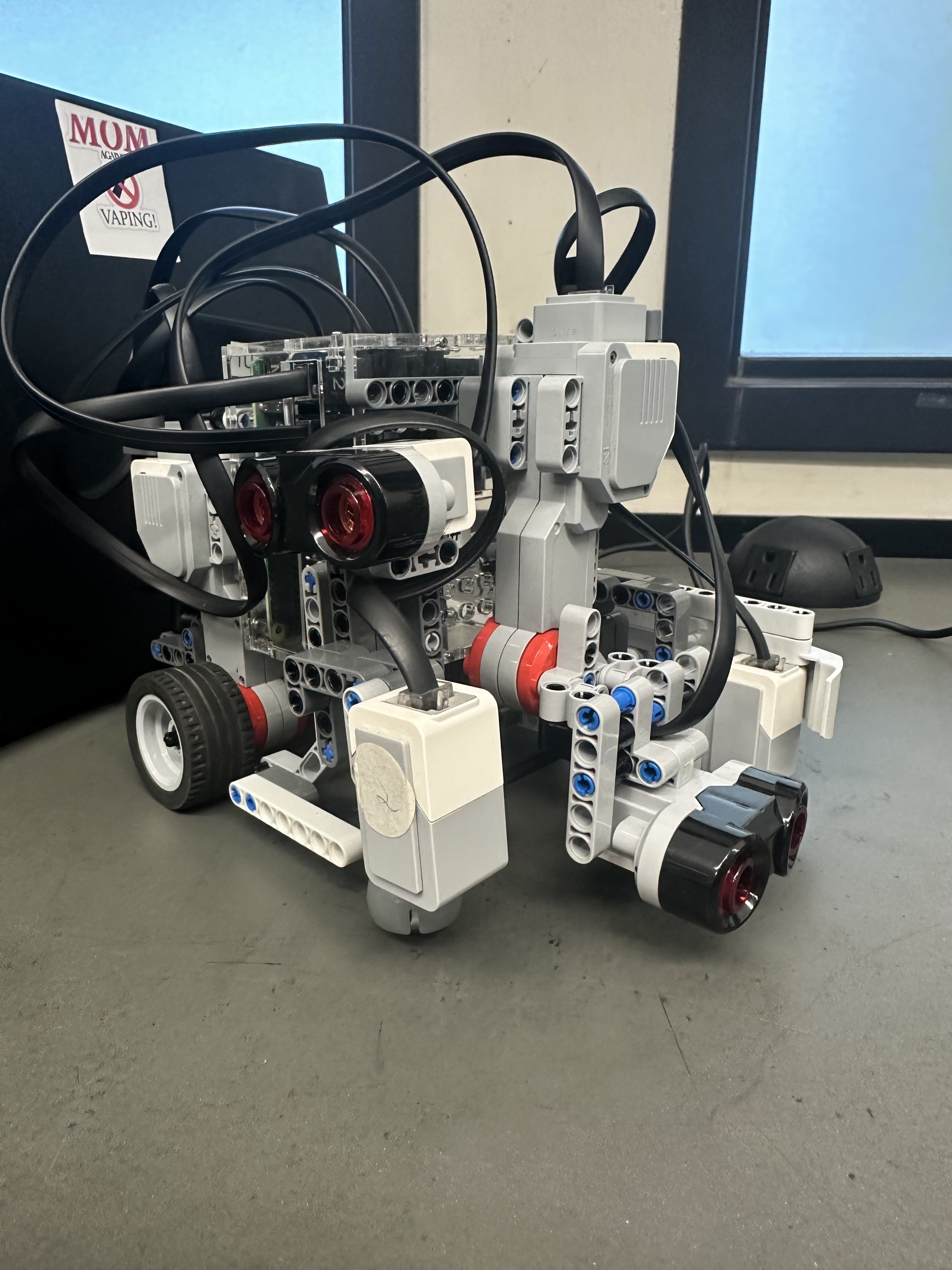
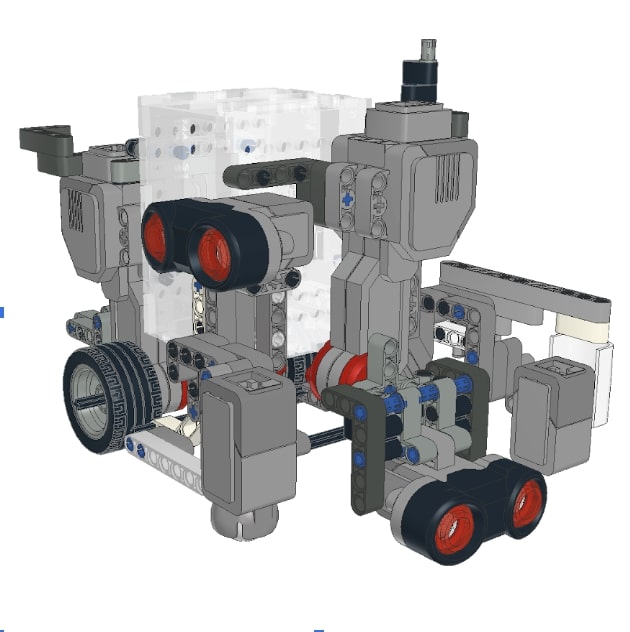
This project involved designing and prototyping an autonomous robot, the Marwan-Bot, capable of navigating park terrains to locate, collect, and deposit dog poop. The robot was built as a proof-of-concept to demonstrate the feasibility of such systems in addressing public hygiene concerns in parks. Utilizing advanced sensors, robust navigation algorithms, and a modular hardware design, the robot traversed a simulated park environment, avoided obstacles, collected poop cubes, and returned to its starting point. The project was developed as part of a semester-long team effort, integrating engineering principles, iterative design, and comprehensive testing. I was selected to be the team Project Manager, responsible for facilating communication between the hardware and software subteams and ensuring the project deadlines were met. See the full project report here.